

Sabbir Rangwala 02:11pm EDT 05 May 2022, Berlin: Mercedes is the first manufacturer in Germany to start selling a system for … [+] dpa/picture alliance via Getty Images
Daimler’s introduction of a Level 3 option (L3, automated driving in certain conditions with the human driver ready to take over once summoned) in the S-Class luxury model is a significant breakthrough for the autonomy revolution. Multiple other automotive companies have announced the imminent availability of this feature including Honda and BMW. 3D imaging with LiDAR (Light Detection and Ranging) is a key sensing technology that makes this possible. A recent article (covering LiDAR at the January 2022 Consumer Electronics Show in Las Vegas) examined the question “Has LiDAR Arrived?” Four months later, the answer is YES.
The major focus for the ~$5B investments (over the past 8 years) in private LiDAR companies was full autonomy (Level 4 or 5 where no human drivers are needed) for ride-hailing, trucking and logistics. Realizing L4/L5 capability has proven to be more challenging than originally envisioned due to technical, safety, regulatory and cost considerations. In many cases, the business cases for monetizing this capability have also proven to be unclear. For LiDAR companies, this is a difficult quest given the longer time horizons and the fact that the major L4 players are developing their internal LiDARs (Waymo, Aurora, Argo).
The target markets for full autonomy are businesses, with substantially lower volumes of vehicles (< 5M/year versus the ~100M cars sold/year to consumers). Automotive OEMs were ill-equipped to compete in the full autonomy market and saw the opportunity for adding limited autonomy features to their cars and selling the proposition of comfort, free time and safety to a larger customer base. This has pivoted many LiDAR companies to address L2 and L3 autonomy. Recent announcements include companies like Valeo (Mercedes), Innoviz (BMW), Luminar (Volvo), Cepton (General Motors), Ibeo (Great Wall Motors) and Innovusion (Nio). Partnerships with automotive Tier 1 suppliers have also crystallized (Aeye-Continental, Baraja-Veoneer, Cepton-Koito, Innoviz-Magna).
Range and point density (points/second or PPS) are critical performance parameters that govern the perception capability that LiDAR provides. These include detection and classification of lane markings, traffic infrastructure, road surface, pedestrians, vehicles and road debris at adequate range to enable safe and comfortable autonomy manoeuvers. While performance is critical, the pivot to consumer cars has driven LiDAR companies to focus also on more “mundane” characteristics like price, size, power consumption, vehicle integration/styling, manufacturing scalability and safety certification. The recent Autosens conference in Detroit highlighted this and is a good indicator that LiDAR for the automotive market has finally arrived. A total of seven LiDAR companies participated – Aeye, Baraja, Cepton, Insight, Seagate, Valeo and Xenomatix.
Money, Money, Money
A panel session at Autosens discussed the price (or pain) threshold that makes LiDAR affordable for consumer vehicles. No specific numbers were mentioned (for obvious reasons). As a reference, automotive cameras and radar are priced in the range of $10-20 and $50-100 respectively, and the dream is that LiDAR will achieve similar price points. This is unreasonable in the foreseeable future for a couple of reasons. First, cameras and radars have experienced several decades of maturity and scaling for consumer cars for ADAS (Automotive Driver Assistance Systems). Second, they rely primarily on silicon and CMOS technologies which leverage the scale of consumer and industrial electronics. LiDAR is less mature and relies on complex optical semiconductor technology (especially the lasers). The supply chain in this area is simply not positioned today to support such pricing.
One way to rationalize an acceptable threshold price for LiDAR is to relate it to the L3 option price. For the Mercedes S-Class, this is ~$5000. Given that LiDAR makes this functionality possible, it is reasonable to assume that LiDAR can command a $500 (or 10% of the L3 option price) price point. As mid-price cars start offering this option, the L3 price will need to reduce (~$3000), with LiDAR price reducing to ~$300. Broad customer acceptance is only likely to occur if the Operational Design Domain (ODD) expands (in terms of speeds, location, weather, etc.) and no significant safety incidents occur during this evolution.
Size Matters
The “Style Studio is King” theme was emphasized repeatedly at Autosens, with the advice that sensor integration must occur without compromising the overall styling and emotional appeal of consumer cars. Size and power consumption govern where and how sensors are integrated. Most of the power consumed in sensors (especially LiDAR) is converted to heat. Minimizing this is beneficial from efficiency, thermal management and size reduction perspectives. Radar sensors range from 100-500 cm³ in volume and consume 5-15W of power (depending on performance). Cameras are significantly smaller and power-efficient (typically in the range of 25 – 200 cm³ and ~3W power consumption). Real estate is precious in a car, and as L2 and L3 functionalities evolve, LiDAR needs to compete with these conventional sensors for space, power, compute resources and thermal management. Table 1 compares the size and power consumption of LiDAR designs across range and PPS (points/second) performance parameters: 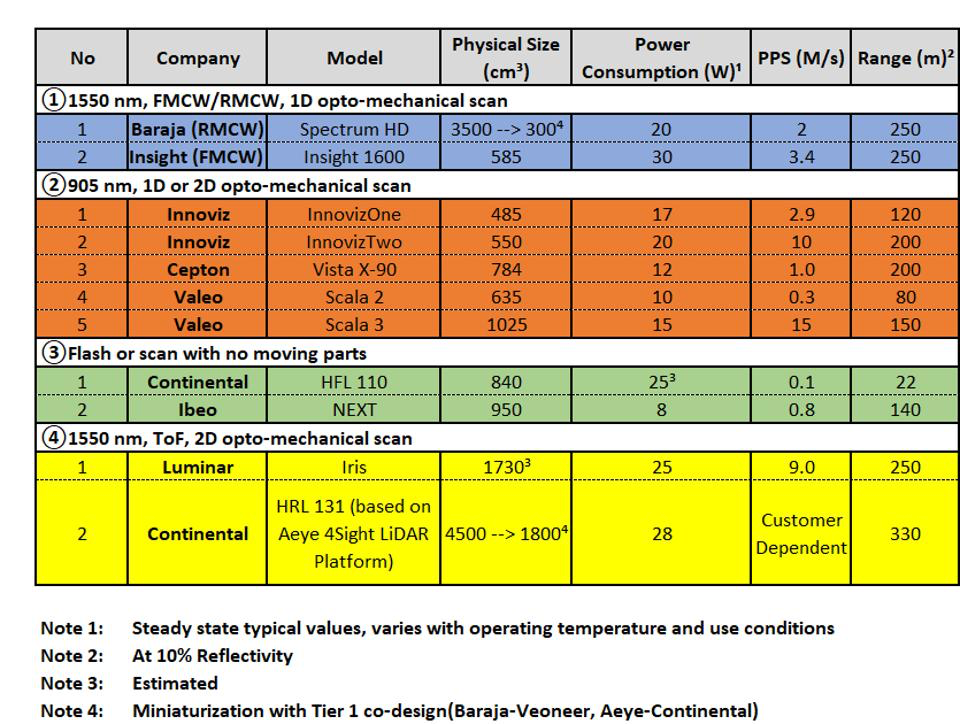
Table 1: Size and Power Consumption vs Performance for Selected Automotive LiDARs
Patience Consulting LLC
Operating physics, scanning approach and wavelength are critical factors that drive size and power consumption. The main conclusions from Table 1 are as follows:
1.④ is the least compact approach. 1550 nm ToF (Time-of-Flight) operation requires high peak power fiber lasers, which are not as compact as semiconductor diode lasers. 2D scanning and separate transmit/receive apertures also tend to make the LiDAR bulkier.
2.① seems to be the most compact approach. FMCW/RMCW (Frequency/Randomly Modulated Continuous Wave) uses homodyne detection (optically mixes a portion of the transmitted beam with the receive beam). This allows for use of diode lasers integrated with semiconductor optical amplifiers. Opto-mechanical scanning occurs in one dimension (horizontal direction). Vertical scanning is accomplished with tunable lasers and prism-like optics (no moving parts). It also uses a mono-static architecture (transmit/receive occurs through one aperture).
3.As compared to 905 nm (②), 1550 nm LiDARs (① and ④) consume higher power but also deliver higher range performance. The higher power consumption is due to multiple factors. First, lasers are allowed to be driven at higher optical power (eye-safety thresholds for 1550 nm are much higher than at 905 nm). Second, 1550 nm lasers are less efficient and consume more electrical power. Finally, due to higher temperature sensitivity, 1550 nm lasers need to be cooled or temperature stabilized. This consumes power.
4.Generational improvements in LiDAR range and PPS performance (Innoviz and Valeo in ②) increase power consumption. This is understandable since higher performance requires more laser power, duty cycle and spatial frequency. Signal processing computing power also increases. Size seems to scale proportionally with increased power consumption in these cases.
5.Relative to the modest performance that Flash LiDAR (③) delivers, it is expensive in terms of size and power consumption. If eliminating moving parts is a key consideration (reliability or integration), architectures using electronic scanning are much more attractive (③) since they deliver significantly higher performance at an equivalent size and dramatically lower power consumption. The compromise is that global shutter operation is not possible, leading to blurring effects in the point cloud.
6.Co-design partnerships between LiDAR manufacturers and Tier 1 companies (Baraja-Veoneer, Continental-Aeye) are beneficial in terms of size reduction.
LiDAR is maturing in terms of integration, size and power consumption. Relative to radar, it is still ~2-3X larger in terms of size and power consumption. Imaging cameras are even more compact and power-efficient (lower than 10X lower in size, 5X in power). 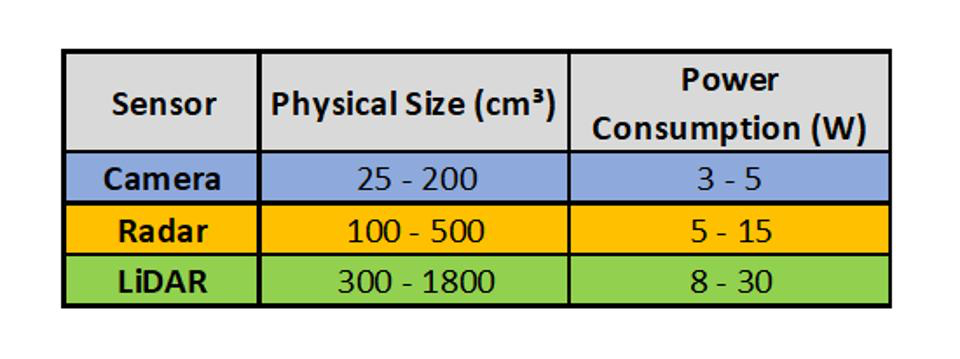
Safety Standards and Certification NVIDIA presented its approach to addressing two key standards for safety certification of sensors: ISO 26262 Functional Safety Standard and the emerging ISO 21448 standard which deals with the Safety of Intended Function (SOTIF). The latter addresses how a particlar vehicle feature performs over the promised ODD. For a new sensor like LiDAR, translating this into object detection and classification (for example a vehicle, pedestrian, obstacles and traffic infrastructure) in adverse lighting and weather conditions is critical. LiDAR suppliers are increasingly focused on this new standard, although it is unclear whether this is something that will be undertaken by the OEM or Tier 1 (since it may rely on fusion and higher level software stacks).
Trioptics (a division of Jenoptik) presented some of the manufacturing equipment challenges of building LiDAR in high volumes for the automotive market. Precision alignment and bonding of optical, mechanical and electronics components is key for high throughput LiDAR manufacturing, as is the ability to calibrate and test sub-assemblies and final products at very low cycle times. The key is to ensure that every sub-component is designed and procured with adequate precision levels and fiducials so that robotic automation can function effectively. Trioptics is building commercially available equipment for LiDAR production and their proposition is similar to the scaling of fiber optic-based communication systems two decades ago. It spawned a specialized equipment industry dedicated to the manufacturing of opto-electronic components, including burn-in/test, fiber alignment/attachment, die/wire bonding, hermetic sealing and reliability testing systems.
Table 2: Comparison of Size and Power Consumption Patience Consulting LLC Will LiDAR ever reach parity with these other sensors over time? 1550 nm FMCW/RMCW LiDAR (①) offers the best potential for size parity with radar once implemented in a silicon photonics platform with chip-scale optical scanning in two dimensions (an area of active research today, but not yet practically feasible). Power consumption is not likely to reduce since major materials improvements would need to occur in the fundamental laser technology (significant investments over the last three decades have occurred in this area to support fiber optics communication, and dramatic improvements are unlikely). The major portion of power consumption is due to the laser, and more than 70% of this is converted to heat, which needs to be managed. This in turn sets a lower bound on size.
Manufacturing: 1-1000 is easy, 1000,000 is hard (if you want to make $)
Ensuring that a complex opto-mechanical sensor like LiDAR can scale gracefully from prototypes to high volume production requires that supply chain and manufacturability are considered in the early stages of the design. Partnerships between LiDAR companies and Tier 1 suppliers (who have mastered the processes and science of scaling efficiently into volume production) are invaluable in this regard. Valeo designs and manufactures its LiDAR (SCALA series). At Autosens, they presented considerations that impact the design process – technology choices, suppliers, process simplicity, cost, reliability and scalability. Cycle times and scrap levels are rigorously analyzed and verified. Valeo’s philosophy has been to introduce “fit for function” designs that meet current automotive customer needs (may not initially lead competitors in performance but are reliable and easy for customers to deploy), launch these into volume production and use the scaling and low-cost experience as a basis for performance upgrades for future designs. Over 170,000 automotive-grade LiDARs have been manufactured to date (across SCALA 1 and 2 series, SCALA 2 is currently designed in the Mercedes S class discussed earlier). SCALA 3 leverages this experience with significantly higher performance and is expected to launch in 2023. Valeo’s approach (which is typical for Tier 1 and other high-volume manufacturing companies) is different from many venture-funded LiDAR companies which tend to focus initially on maximizing performance and assume that scaling and cost requirements will get addressed once volumes increase. This is a difficult proposition. Seagate Technology is a large manufacturer of hard disk drives (HDD), producing more than 100 million units per year. At Autosens, they presented and demonstrated their LiDAR, a 1550 nm system capable of dynamic foveation, 120° field of view, 250 m range and 25W power consumption. The company pioneered HAMR (Heat Assisted Magnetic Recording) for increasing the storage capacity of HDD. Laser diodes mounted on the recording head are used to locally heat single bits to flip magnetic polarity and assist in the writing process. Optics, precision mechanics, high-speed electronics and scanning are key design platforms. HDD manufacturing lines utilize precise positioning (sub-micron) and bonding of optical, mechanical and electronic parts, and high throughput in-line and final testing. Seagate’s strategy is to leverage the patents, relevant technology blocks and manufacturing infrastructure of their HDD products for automotive LiDAR. The effort has been ongoing for the past 2-3 years, and at this point, detailed specifications and plans are not public. Seagate is probably unlike any other entrant to date in the crowded LiDAR ecosystem. They are starting with an existing high-volume, low-cost production line and inserting product designs of similar complexity into it. They could disrupt the LiDAR market in the future.
Trioptics (a division of Jenoptik) presented some of the manufacturing equipment challenges of building LiDAR in high volumes for the automotive market. Precision alignment and bonding of optical, mechanical and electronics components is key for high throughput LiDAR manufacturing, as is the ability to calibrate and test sub-assemblies and final products at very low cycle times. The key is to ensure that every sub-component is designed and procured with adequate precision levels and fiducials so that robotic automation can function effectively. Trioptics is building commercially available equipment for LiDAR production and their proposition is similar to the scaling of fiber optic-based communication systems two decades ago. It spawned a specialized equipment industry dedicated to the manufacturing of opto-electronic components, including burn-in/test, fiber alignment/attachment, die/wire bonding, hermetic sealing and reliability testing systems.
Safety Standards and Certification
NVIDIA presented its approach to addressing two key standards for safety certification of sensors: ISO 26262 Functional Safety Standard and the emerging ISO 21448 standard which deals with the Safety of Intended Function (SOTIF). The latter addresses how a particlar vehicle feature performs over the promised ODD. For a new sensor like LiDAR, translating this into object detection and classification (for example a vehicle, pedestrian, obstacles and traffic infrastructure) in adverse lighting and weather conditions is critical. LiDAR suppliers are increasingly focused on this new standard, although it is unclear whether this is something that will be undertaken by the OEM or Tier 1 (since it may rely on fusion and higher level software stacks).
Automotive LiDAR has definitely arrived. While L4 autonomy market is still far away, limited autonomy levels (L2 and L3) that require LiDAR offer a more lucrative and near term opportunity. Design-in opportunities are limited and competing for these is brutal. Winning these will require delivering the right balance of performance, cost, reliability and ease of integration. Note: Table 1 has been updated to reflect that Baraja’s uses Randomly Modulated Continuous Wave (RMCW)